ロボティクス特許図面
ロボット発明は動きをクレームしますが、動きこそ静止したシートに載せるのが最も難しいものです。機能する図面セットは、多状態の機械図と制御系ダイアグラムの組み合わせ——その対応表と、避けるべき失敗を解説します。
- 多状態のモーション図
- ファントム線で第2姿勢
- 制御系ブロック図
- 層をまたぐ符号の一貫性
30秒でわかる答え
- クレームの各層を図面タイプに対応させます:キネマティクス → ファントム線付き多状態ビュー、エンドエフェクタ → 拡大詳細図、制御系 → ブロック図、計画手法 → フローチャート。
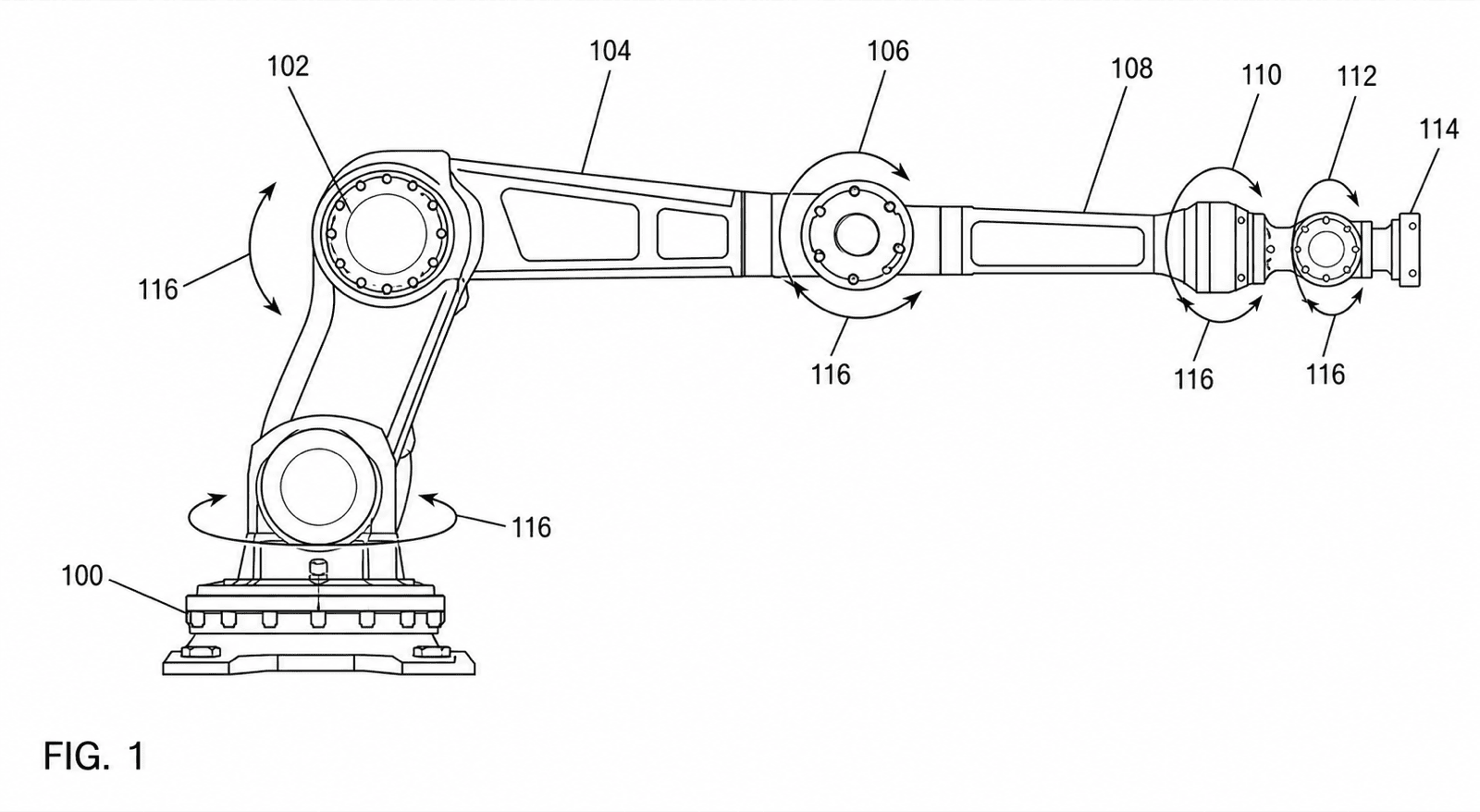
- 動きは、主姿勢を実線、別姿勢をファントム線(二点鎖線)で描き、可動範囲を円弧と矢印で示します。
- 各図面を写真、CAD ビュー出力、記述から PatentFig AI で生成し、セット全体で符号を一貫させ、出願前にチェッカーを通してください。
ロボティクス図面の例
各例は架空の発明です。開くとプロンプトがジェネレーターに読み込まれます。
どの図面がどのクレームを支えるか
ロボティクスのクレームは機構・制御・方法と層を成します——各層を図面タイプに対応させましょう。
キネマティクスクレーム → 多状態図
アームやリンク機構の主姿勢を実線で、第2姿勢をファントム線で同一ビューに描き、クレームされた可動範囲が1枚のシートで読み取れるようにします。
エンドエフェクタクレーム → 拡大詳細図
グリッパー、ツールチェンジャー、コンプライアントフィンガーには、ジョー形状と駆動が判読できる別個の拡大詳細図(FIG. 1 の円2から FIG. 2 へ)が必要です。
制御系クレーム → ブロック図
コントローラー、ドライブ、エンコーダー、センサー、通信バスを信号矢印付きのラベル付きブロックとして描き、各ブロックに番号を付けて明細書がアーキテクチャを記載できるようにします。
経路計画・方法クレーム → フローチャート
クレームの文言を反映した番号付きステップ:検知、計画、衝突チェック、実行、反復——判断分岐の菱形には YES/NO のラベルを付けます。
組立クレーム → 分解図
関節モジュール、ハーモニックドライブ、ハウジングを破線の整列軸に沿って分離し、組立の記載のためにすべての部品に番号を付けます。
オフィスアクションを招くロボット図面の失敗
ロボット図面に特有の失敗パターン——どれも生成時に避けられます。
円弧注記のない可動範囲
回転範囲をクレームしながら静止した1姿勢しか描かないと、審査官がクレームを対応づける手がかりがありません——状態間に方向矢印付きのモーション円弧を加えてください。
ファントム線のない複数姿勢
2つの姿勢を同じ実線で描くと2台の装置に読めてしまいます。別姿勢はファントム線(二点鎖線)で描くべきものです。
自由度と符号の不一致
クレームが6関節を記載するなら、番号付きの関節が6つ現れなければなりません——6自由度クレームの下に5関節の図面があれば開示の指摘を招きます。
線画でなくレンダリングを提出
ラボの写真とシェーディング付き CAD レンダリングは白黒線画の規則を満たしません。変換してください——ロボットアームのグラデーション陰影は確実に指摘されます。
ロボット図面の外注 vs PatentFig AI
ロボティクスのセットは大きい——機械図に加えダイアグラムも——図単位課金が最も痛むところです。
PatentFig AI が合うのは
- セットに機械図、ブロック図、フローチャートが混在し、1つのツールで全部扱いたいとき
- 入力が CAD スクリーンショット、ラボの写真、ホワイトボードのスケッチのとき
- 関節とリンクの符号を FIG. 1 から制御図まで一貫させたいとき
- 起草中のクレーム補正に伴う修正が見込まれるとき
専門家に任せるべきなのは
- 訴訟級の図面セットに認証付きの最終仕上げが必要なとき
- ネイティブ CAD ファイルから21ビューの正投影一式を自動生成したいとき
- 特許線画でなく、寸法管理された工学図面が必要なとき
業界別ガイド