机器人附图示例
每个示例都是虚构发明。打开任意一个,用其提示词预填生成器。
哪些图支撑哪些权利要求
机器人权利要求把机械叠在控制之上、控制叠在方法之上——给每层配上它的图型。
1
运动学权利要求 → 多状态附图
在同一视图里,机械臂或连杆机构的主姿态用实线、第二姿态用幻影线,让主张的运动范围在一页之内一目了然。
2
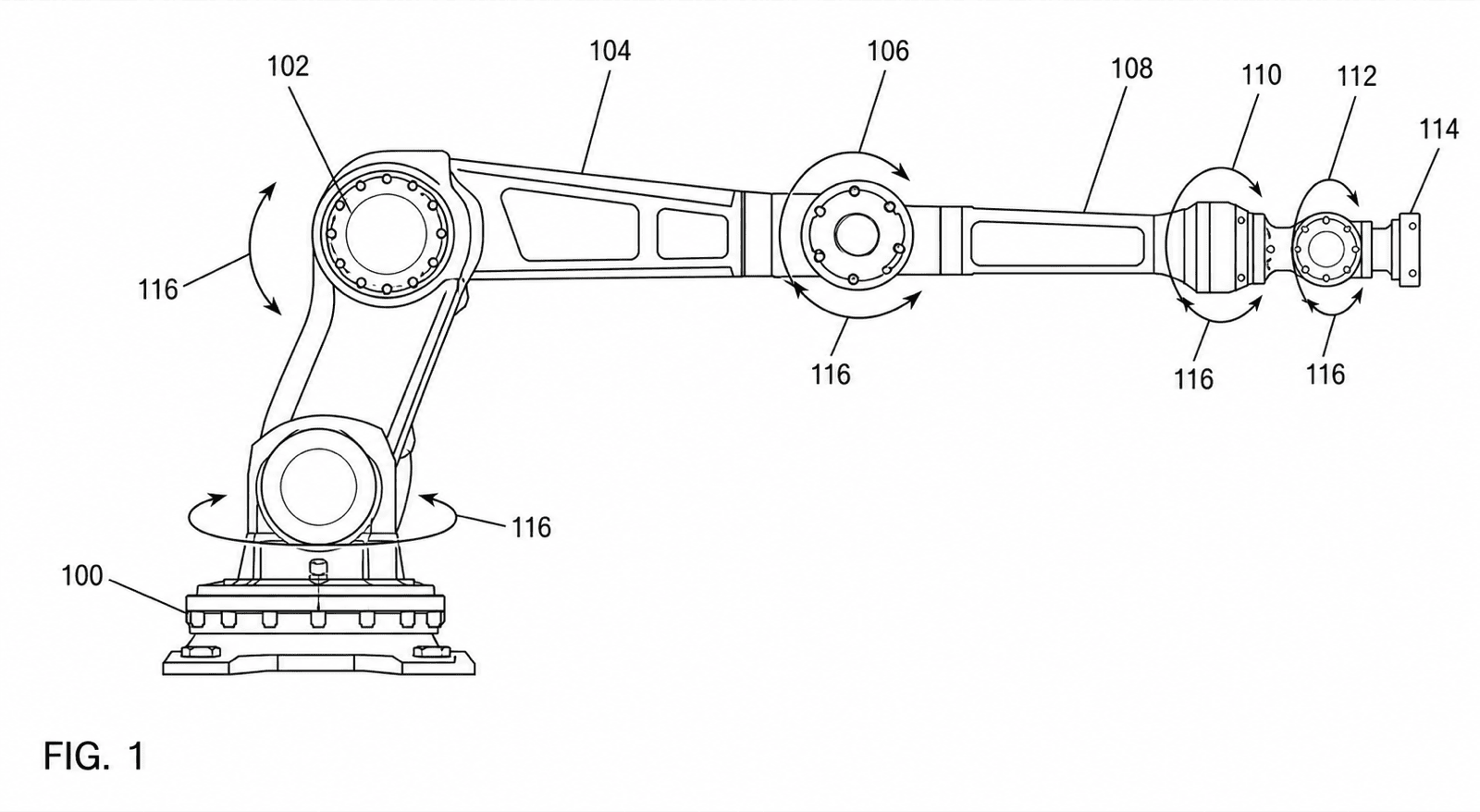
末端执行器权利要求 → 放大细节图
抓手、换刀器和柔顺手指需要单独的放大细节视图(从 FIG. 1 的圆圈 2 引出 FIG. 2),让钳口几何和驱动方式清晰可辨。
3
控制系统权利要求 → 框图
控制器、驱动器、编码器、传感器和通信总线画成带信号箭头的标注方块——每块都编号,让说明书能逐一引述架构。
4
路径规划与方法权利要求 → 流程图
编号步骤呼应权利要求语言:感知、规划、碰撞检查、执行、重复——判断菱形带 YES/NO 分支标签。
5
装配权利要求 → 爆炸视图
关节模块、谐波减速器和壳体沿虚线对齐轴分离,每个部件编号,供装配项逐一引述。
会招来审查意见的机器人附图错误
机器人附图特有的失败模式——在生成阶段全部可以避免。
运动范围没有弧线标注
主张了旋转范围却只画一个静态姿态,审查员无处把权利要求对上图——在两个状态之间加上带方向箭头的运动弧线。
多个姿态不用幻影线
两个姿态都用同样的实线画,读起来像两台设备。备选姿态应该用幻影线(双点划线)。
自由度与标号对不上
权利要求写了六个关节,图上就必须出现六个编号的关节——六自由度权利要求配五关节附图,等于邀请一条公开性异议。
把渲染图当线稿递交
实验室照片和着色 CAD 渲染图过不了黑白线稿规则。转换它们——机械臂上的渐变阴影必然招来异议。
外包机器人附图 vs PatentFig AI
机器人图组很大——机械视图加各类图表——恰恰是按图计费最疼的地方。
绘图服务
PatentFig AI
多状态运动附图
专家活,按专家费率
生成时即带幻影线第二姿态
混合图组(视图 + 图表)
常常要两个供应商或两条队列
一个工作台覆盖全部图型
跨层标号一致性
人工协调
同一部件、同一标号、每张图
随权利要求修改的修订
每轮 $50–$100,各要数天
对话即改,当天完成
典型图组成本(8–12 张)
$800–$3,000
$50/月 · 500 积分 · 约 50 张(每张约 $1)
合规检查
取决于供应商
内置六局检查器
PatentFig AI 更合适的场景
- 图组混合机械视图、框图和流程图——一个工具全包
- 你的输入是 CAD 截图、实验室照片或白板草图
- 关节和连杆的标号必须从 FIG. 1 一直一致到控制图
- 撰写期间权利要求会修改,预计有多轮修订
该请专家的场景
- 诉讼级图组需要经认证的最终打磨
- 需要从原生 CAD 文件自动生成 21 视图正投影图组
- 图样需要标注工程公差,而不是专利线稿
行业指南