로보틱스 특허 도면
로봇 발명은 동작을 청구하는데, 동작은 정지된 시트에 담기 가장 어려운 것입니다. 작동하는 도면 세트는 다중 상태 기계 뷰와 제어 시스템 다이어그램을 짝짓습니다 — 그 매핑과 피해야 할 실수를 정리합니다.
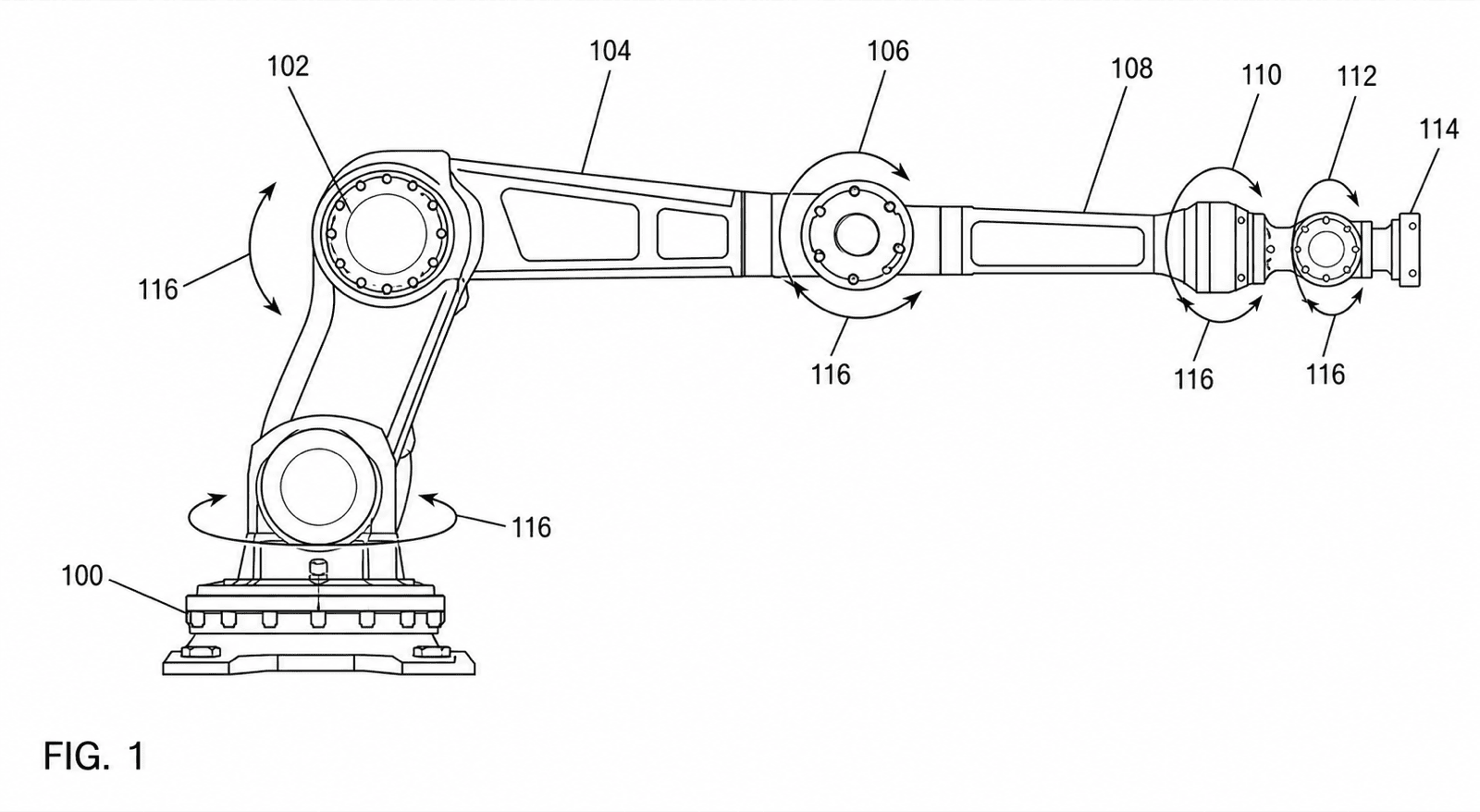
- 다중 상태 동작 도면
- 팬텀선 제2 자세
- 제어 블록도
- 층을 가로지르는 부호 일관성
30초 요약
- 청구 층마다 도면 유형을 매핑하세요: 기구학 → 팬텀선이 있는 다중 상태 뷰, 엔드이펙터 → 확대 상세도, 제어 시스템 → 블록도, 계획 방법 → 순서도.
- 동작은 1차 자세를 실선으로, 대체 자세를 팬텀선(이점쇄선)으로 그리고, 호와 화살표로 이동 범위를 표시하세요.
- 각 도면을 PatentFig AI에서 사진, CAD 뷰 내보내기, 설명으로 생성하고, 세트 전체에서 부호를 일관되게 유지하며, 출원 전에 검사기를 돌리세요.
로보틱스 도면 예시
각 예시는 가상의 발명입니다. 열면 프롬프트가 생성기에 미리 채워집니다.
어떤 도면이 어떤 청구항을 받치나
로보틱스 청구는 기계 위에 제어, 그 위에 방법을 쌓습니다 — 각 층을 도면 유형에 맞추세요.
기구학 청구 → 다중 상태 도면
암이나 링크 기구의 1차 자세를 실선으로, 제2 자세를 같은 뷰에 팬텀선으로 그려 청구된 운동 범위가 한 시트에서 읽히게 하세요.
엔드이펙터 청구 → 확대 상세도
그리퍼, 툴 체인저, 유연 핑거에는 별도의 확대 상세 뷰(FIG. 1의 원 2에서 나온 FIG. 2)가 필요합니다 — 죠 기하와 구동이 판독 가능한 곳에서요.
제어 시스템 청구 → 블록도
컨트롤러, 드라이브, 인코더, 센서, 통신 버스를 신호 화살표가 있는 라벨 블록으로 — 명세서가 아키텍처를 인용할 수 있게 각 블록에 번호를 매기세요.
경로 계획·방법 청구 → 순서도
청구항 문구를 그대로 비추는 번호 단계: 감지, 계획, 충돌 검사, 실행, 반복 — 판단 마름모에는 YES/NO 분기 라벨을 붙입니다.
조립 청구 → 분해도
관절 모듈, 하모닉 드라이브, 하우징을 점선 정렬축을 따라 분리하고, 조립 인용을 위해 모든 부품에 번호를 매깁니다.
의견제출통지를 부르는 로보틱스 작도 실수
로봇 도면 특유의 실패 패턴 — 모두 생성 시점에 피할 수 있습니다.
호 표기 없는 운동 범위
회전 범위를 청구하면서 정지 자세 하나만 그리면 심사관이 청구항을 매핑할 대상이 없습니다 — 상태 사이에 방향 화살표가 있는 동작 호를 추가하세요.
팬텀선 없는 복수 자세
두 자세를 똑같은 실선으로 그리면 두 대의 장치로 읽힙니다. 대체 자세는 팬텀(이점쇄선) 선 작업으로 그려야 합니다.
부호와 어긋난 자유도
청구항이 여섯 관절을 기재하면 번호 매긴 관절 여섯 개가 나와야 합니다 — 6자유도 청구 아래의 5관절 도면은 공개 지적을 부릅니다.
선화 대신 렌더를 제출
실험실 사진과 음영 CAD 렌더는 흑백 선화 규칙에 미달합니다. 변환하세요 — 로봇 암 위의 그라데이션 음영은 확정된 지적감입니다.
로봇 도면 외주 vs PatentFig AI
로보틱스 세트는 큽니다 — 기계 뷰에 다이어그램까지 — 건당 과금이 가장 아픈 바로 그 지점입니다.
PatentFig AI가 더 맞는 경우
- 세트가 기계 뷰, 블록도, 순서도를 섞을 때 — 모두를 한 도구로
- 입력이 CAD 스크린샷, 실험실 사진, 화이트보드 스케치일 때
- 관절과 링크 부호가 FIG. 1부터 제어 다이어그램까지 일관돼야 할 때
- 작성 중 청구항 보정에 따라 수정이 예상될 때
전문가를 부르는 게 맞는 경우
- 소송급 도면 세트에 인증된 최종 마감이 필요할 때
- 네이티브 CAD 파일에서 21개 정투상 뷰 세트 자동 생성이 필요할 때
- 특허 선화가 아니라 측정된 공학 공차가 필요한 도면일 때
산업 가이드