Robotik-Patentzeichnungen
Robotererfindungen beanspruchen Bewegung, und Bewegung ist das Schwierigste, was man auf ein statisches Blatt bringen kann. Das funktionierende Figurenset kombiniert Mehrzustands-Mechanikansichten mit Regelungsdiagrammen — hier die Zuordnung und die Fehler, die Sie vermeiden sollten.
- Mehrzustands-Bewegungsfiguren
- Zweite Posen in Phantomlinien
- Regelungs-Blockdiagramme
- Konsistente Bezugszeichen über alle Ebenen
Die 30-Sekunden-Antwort
- Ordnen Sie jeder Anspruchsebene ihren Figurentyp zu: Kinematik → Mehrzustandsansichten mit Phantomlinien, Endeffektoren → vergrößerte Details, Regelungssysteme → Blockdiagramme, Planungsverfahren → Flussdiagramme.
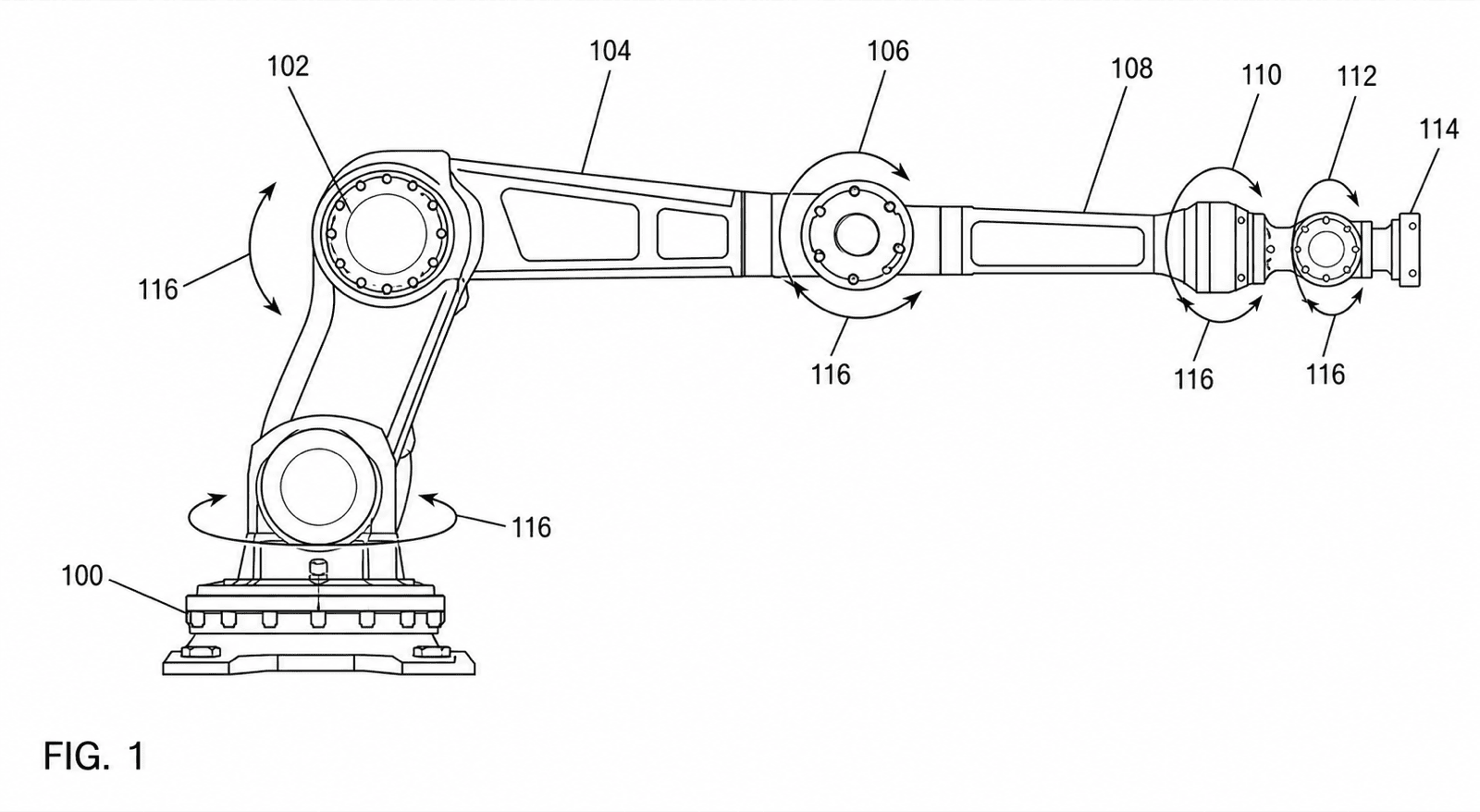
- Zeigen Sie Bewegung mit durchgezogenen Linien für die Hauptpose und Phantomlinien (Strich-Zweipunkt) für alternative Posen, mit einem Bogen und Pfeilen für den Bewegungsbereich.
- Erzeugen Sie jede Figur aus Foto, CAD-Ansichtsexport oder Beschreibung in PatentFig AI, halten Sie die Bezugszeichen über das Set konsistent und lassen Sie den Prüfer vor der Einreichung laufen.
Robotik-Figurenbeispiele
Jedes Beispiel ist eine fiktive Erfindung. Öffnen Sie eines, um den Generator mit dem Prompt vorzubefüllen.
Welche Figuren welche Ansprüche stützen
Robotik-Ansprüche schichten Mechanik über Regelung über Verfahren — ordnen Sie jeder Ebene ihren Figurentyp zu.
Kinematik-Ansprüche → Mehrzustandsfiguren
Zeigen Sie Arm oder Gestänge in der Hauptpose mit durchgezogenen Linien und eine zweite Pose in Phantomlinien in derselben Ansicht, sodass der beanspruchte Bewegungsbereich auf einem Blatt lesbar ist.
Endeffektor-Ansprüche → vergrößerte Details
Greifer, Werkzeugwechsler und nachgiebige Finger brauchen eine eigene vergrößerte Detailansicht (FIG. 2 aus Kreis 2 in FIG. 1), in der Backengeometrie und Aktuierung lesbar sind.
Regelungssystem-Ansprüche → Blockdiagramme
Steuerung, Antriebe, Encoder, Sensoren und Kommunikationsbusse als beschriftete Blöcke mit Signalpfeilen — jeder Block nummeriert, damit die Beschreibung die Architektur rezitieren kann.
Pfadplanungs- und Verfahrensansprüche → Flussdiagramme
Nummerierte Schritte, die die Anspruchssprache spiegeln: erfassen, planen, Kollision prüfen, ausführen, wiederholen — Entscheidungsrauten mit JA/NEIN-Zweigbeschriftungen.
Montage-Ansprüche → Explosionsansichten
Gelenkmodule, Harmonic Drives und Gehäuse entlang einer gestrichelten Ausrichtungsachse getrennt, jedes Teil für die Montage-Rezitation nummeriert.
Robotik-Zeichnungsfehler, die Prüfbescheide kosten
Die für Roboterfiguren typischen Fehlermuster — alle bei der Erzeugung vermeidbar.
Bewegungsbereich ohne Bogen-Annotation
Einen Rotationsbereich zu beanspruchen, aber nur eine statische Pose zu zeichnen, lässt dem Prüfer nichts, worauf er den Anspruch abbilden kann — ergänzen Sie den Bewegungsbogen mit Richtungspfeilen zwischen den Zuständen.
Mehrere Posen ohne Phantomlinien
Zwei Posen in identischen durchgezogenen Linien lesen sich als zwei Geräte. Die Alternativpose gehört in Phantomlinien (Strich-Zweipunkt).
Freiheitsgrade nicht synchron mit den Bezugszeichen
Rezitieren die Ansprüche sechs Gelenke, müssen sechs nummerierte Gelenke erscheinen — eine Fünf-Gelenk-Figur unter einem Sechs-DOF-Anspruch lädt zu einer Offenbarungsbeanstandung ein.
Ein Rendering statt Strichzeichnung einreichen
Laborfotos und schattierte CAD-Renderings verfehlen die Schwarz-Weiß-Strichzeichnungsregeln. Konvertieren Sie sie — Verlaufsschattierung auf einem Roboterarm ist eine garantierte Beanstandung.
Roboterfiguren auslagern vs. PatentFig AI
Robotik-Sets sind groß — Mechanikansichten plus Diagramme — genau dort tut Abrechnung pro Figur weh.
PatentFig AI passt besser, wenn
- Das Set Mechanikansichten, Blockdiagramme und Flussdiagramme mischt — ein Tool für alle
- Sie CAD-Screenshots, Laborfotos oder Whiteboard-Skizzen als Eingaben haben
- Gelenk- und Gliednummern von FIG. 1 bis zum Regelungsdiagramm konsistent bleiben müssen
- Überarbeitungen zu erwarten sind, weil Ansprüche während des Entwurfs geändert werden
Ziehen Sie einen Spezialisten hinzu, wenn
- Ein prozesssicheres Figurenset zertifizierten Feinschliff braucht
- Sie automatische orthografische 21-Ansichten-Sets aus nativen CAD-Dateien brauchen
- Die Zeichnung gemessene Fertigungstoleranzen statt Patent-Strichzeichnung verlangt
Branchenleitfaden
FAQ zu Robotik-Patentzeichnungen
Bringen Sie den ganzen Roboter aufs Papier
Kinematik, Greifer, Steuerungen und Algorithmen — erzeugen Sie das komplette Robotik-Figurenset und prüfen Sie es vor der Einreichung.